Vibrations are mechanical oscillations, that occur around an equilibrium point. The oscillations can be periodic or random.
Vibrations of any mechanical device in operation are typically unwanted. Such vibrations can be caused by imbalances in the rotating parts, uneven friction, the meshing of gear teeth,... We can minimize unwanted vibrations with proper designs.
We can decompose any vibrating system into elementary parts:
- spring - a means of storing potential energy (k)
- mass - a means of storing kinetic energy (m)
- damping - a means by which energy is gradually lost (c)
Vibrations can be classified as:
- free (after the initial disturbance, the system is left to vibrate on its own) and forced (the system is subjected to an external force, often a repeating type of force)
- damped and undamped
- linear (all the basic components of a vibration system the spring, the mass, and the damper behave linearly) and nonlinear (one or more basic components of a vibration system are not linear)
- deterministic (magnitude of the excitation (force or motion) acting on a vibratory system is known at any given time) and random (the value of the excitation at any given time can not be predicted - wind velocity, road roughness and ground motion during an earthquake)
When the system vibrates with its own natural frequency, it falls into resonance - it oscillates with the largest amplitude at the same excitation force.
Quantities that are used to describe the vibrations are:
- displacement (in [m])
- velocity (in [m/s])
- acceleration (in [m/s2])
All three quantities are directly related to each other - velocity is a derivation of displacement and acceleration is a derivation of velocity.
Torsional vibration
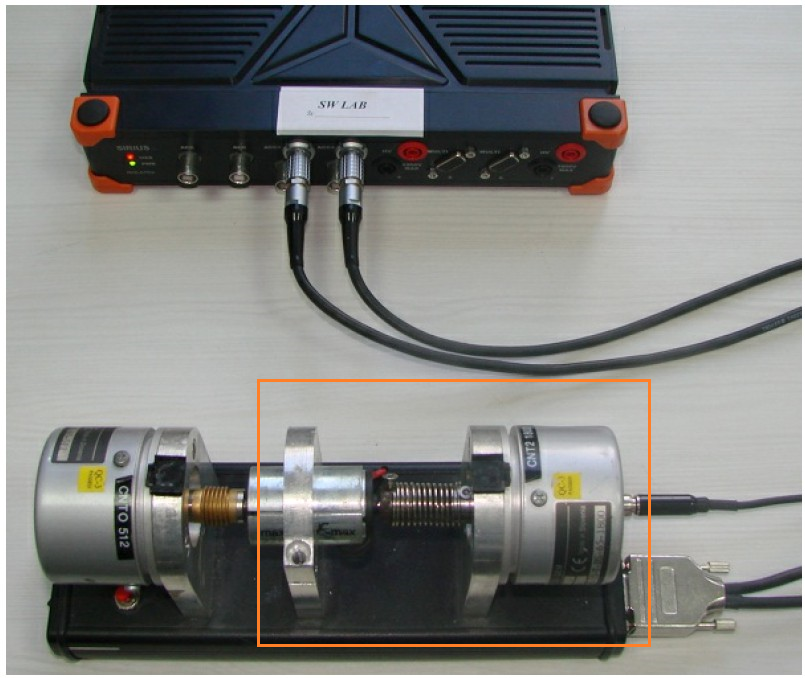
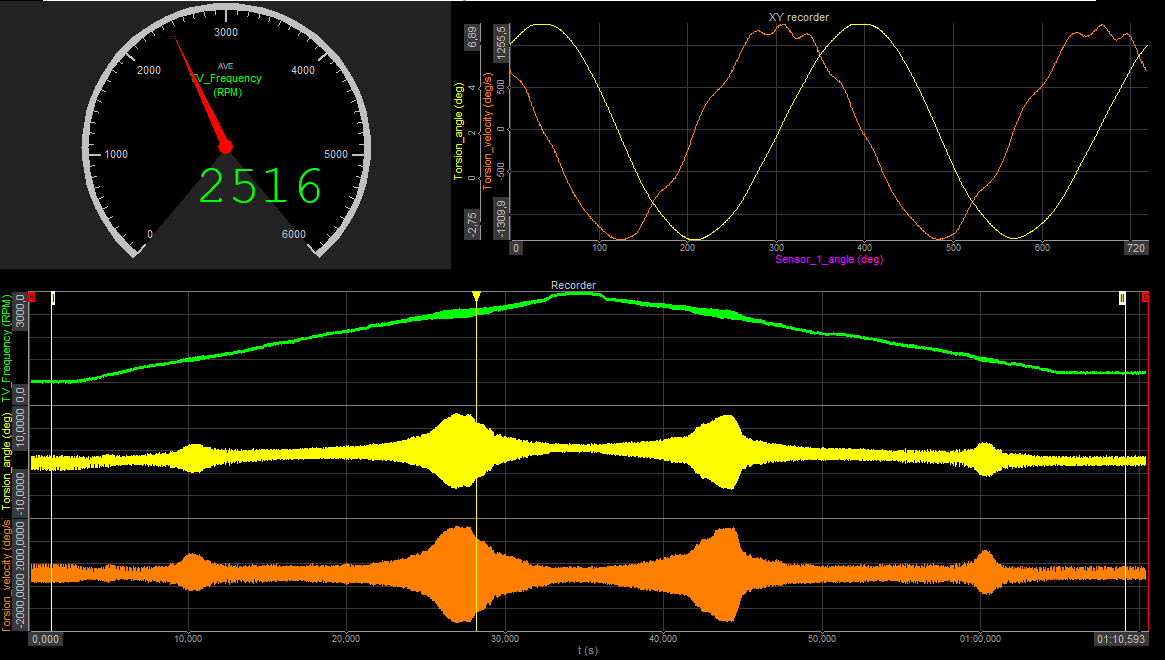
Torsional vibrations are angular vibrations of an object, typically a shaft along its axis of rotation. Torsional vibrations are evaluated as the variation of rotational speed within a rotation cycle. RPM variations are typically induced by a rough driving torque or a varying load.
 Image 1: Torsional vibrations
Image 1: Torsional vibrations
The level of torsional vibration is influenced by a number of parameters, such as material properties, operating conditions (such as temperature, load, RPM, etc.).
Torsional vibrations are important whenever power needs to be transmitted using a rotating shaft or couplings, such as in the case of automotive, truck and bus drivelines, recreation vehicles, marine drivelines or power-generation turbines.
Quantities that are used to describe the torsional vibrations are:
- angular position (in [rad] or [°])
- angular velocity (in [rad/s] or [°/s] or [RPM])
- angular acceleration (in [rad/s2] or [°/s2])
All three quantities are directly linked to each other and can be derived by integration and differentiation. The most common quantity used to measure torsional vibrations is the angular velocity or RPM.
The source of excitation is quantified by torque.
The angular velocity and displacement quantify the response of the applied torque. Torque and angular velocity are linked to each other:
Where T is torque in [Nm] and Jz is the torsion constant or the polar moment of inertia in [m4].
This formulation is similar to the formulation of Newton's law, which links the force acting on a mass to the acceleration of that mass.