GNSS (Global navigation satellite system) is a term used for constellation of satellites providing signals from space. GNSS receivers determine location by using the timing and positioning data encoded in the signals coming from space.
Global Navigation Satellite System (GNSS) is a space based system of satellites that provide location (longitude, latitude, altitude) and time information in all weather conditions, anywhere on or near the Earth where there is an unobstructed line of sight to four or more GNSS satellites.
Currently two GNSS systems have global coverage:
GPS (Global Positioning System) is made by the US and consists of at least 24 operational satellites around the Earth. It is currently the world's most utilized satellite navigation system.
GLONASS (Globalnaya Navigatsionnaya Sputnikovaya Sistema) is the Russian navigation system which consists of 31 satellites (24 operational).
Additional two global navigation systems are currently in construction:
BeiDouNavigation Satellite System is Chinese GNSS system, which currently consists of 22 operational satellites in orbit. The system can already be used for positioning in Asia-Pacific region. Global operational capability with 35 satellites is expected in 2020.
Galileo is European GNSS. Currently there are 18 satellites in orbit. It is expected to be in full operational capability by the year 2020.
True range multilateration or trilateration is the basic concept behind GNSS position calculation. GNSS Satellites are sending signals which contain a fast periodic synchronization code and a slow navigation message. The synchronization code is used to determine the time it took for the signal to reach the receiver. The navigation message contains information about satellite position in space, satellite time, satellite system health and information about GNSS satellites around it. Signals from at least four satellites are needed for the receiver to calculate it's position. Normally more than four satellites are used to determine the position.
2D concept
It is easier to picture the concept of trilateration in two dimensions. A GNSS receiver calculates it's distance to the satellite from the delay in the signal reception. The satellite position at the time of transmission is known (calculated from the data provided in the slower navigation message). The receiver can be anywhere on the circle around the satellite.
Image 2: Possible receiver positions are on the circle around the satellite
If another satellite with known position and distance from the receiver is added then there are two possible positions where the receiver could be.
Image 3: Receiver can lie on one of the intersections
This would be enough to place the receiver in 2D space, but to exactly determine the position we would need a third satellite. However in real world navigation two possible positions are enough. The reason why is because one of the positions is normally in space or deep below the surface of the Earth.
The third satellite in 2D has to be added to eliminate the receiver clock error. There are a number of errors in the range measurement and this is one of the largest errors that can be eliminated. When a receiver gets a signal it determines it's delay from the difference between the time of signal transmission and signal reception. This delay is determined by the receiver clock which is normally not as precise as satellite clocks. Even though the receiver clock is synchronized to the GNSS time frequently during it's operation, small timing errors between the receiver and GNSS clocks do occur.
Distances from delays are calculated from the speed of light (299 792 458 m/s), so even small timing errors can cause large positioning errors (an error of 1 millisecond causes a position error of 300 km). However this error can be eliminated with the use ofan additional satellite, because the receiver clock error is equal for each signal that was received at approximately the same time.
Image 4: Positioning with three satellites, possible positions with receiver clock error (red), possible positions without the receiver clock error (green)
3D concept
In 2D two satellites were needed to determine the receiver position and an additional satellite was needed to correct the receiver clock error. To determine a position in 3D space we need an additional satellite.
If the distance to one satellite is known from the signal delay the receiver could be located anywhere on the sphere around the satellite with the radius of the calculated distance.
Image 5: Possible receiver positions lie on the sphere around a satellite
If two satellites are used the receiver could lie anywhere on the circle that is formed by the intersection of two spheres.
Image 6: Intersection between two spheres forms a circle
With the addition of a third satellite the receiver could be on one of the two points.
Image 7: Two possible positions
As was said earlier two possible positions are enough to determine the receiver position in 3D space. For example, if Position 1 from the upper picture lies somewhere on the Earth surface Position 2 is somewhere in space and has higher altitude than GNSS satellites. However the fourth satellite has to be used to correct the receiver clock error.
Each receiver measures the range between itself and the transmitting satellite. The measured range from the signal delay isn't exact and contains some errors. This range is called a pseudorange. With different corrections these pseudoranges come closer to the exact range and can be used to calculate an accurate receiver position.
\( R^j \) - pseudorange between the GNSS receiver and the satellite at the time of transmission, calculated from signal delay
\(\rho^j\) - distance between the GNSS receiver and the satellite at the time of transmission
\(c\) - speed of light (299 792 458 m/s)
\( \delta t_{rec} \) - receiver clock error
\( \delta t^j_{sat} \) - satellite clock error
\( T^j \) - signal tropospheric delay
\( \hat{\alpha}I^j \) - signal ionospheric delay
\( TGD^j \) - instrumental delay
\( M^j \) - multipath errors
\(\epsilon^j \) - receiver measurement noise
Navigation equations
Each pseudorange is a sum of the true distance to the satellite which is unknown and has different errors. True distance can be written as a distance between the unknown receiver coordinates and satellite coordinates.
All of the errors except the receiver clock error depend on the satellite position with respect to the receiver position at the time of transmission. They are normally corrected with some models.
There are now four variables in range equations that are unknown, the receiver coordinates \(x_{rec}, \space y_{rec}, \space z_{rec} \) and the receiver clock error \(\delta t_{rec}\). Therefore at least four pseudorange measurements from different satellites are needed to get a solution to these variables (a system of four equations with four variables).
Normally more than four satellites are used to obtain the solution. The solution is a best fit to the over-determined (more equations than the unknown variables) navigation equation system.
GNSS satellites transmit two or more radio signals. Each signal has it's exact carrier frequency which carries two signals, a faster ranging code signal and slower navigation data signal. These two signals are multiplexed on the carrier signal. Both signals are modulated on to the carrier by a binary phase shift keying (BPSK) - binary 1 has a different carrier signal phase than binary 0.
The Carrier signal is an electromagnetic signal at a given frequency that is in the radio frequency range (from 20 kHz to about 300 GHz, roughly speaking).
The Ranging code is a sequence of 0s and 1s (zeroes and ones), which allows the receiver to determine the travel time of the radio signal from the satellite to the receiver. Ranging codes are called Pseudo-Random Noise (PRN) sequences or PRN codes .
The Navigation data isa binary-coded message that provides information on the satellite position (ephemeris), clock bias parameters, positions of other satellites in the constellation (almanac), satellite health status, and other complementary information.
Current GNSS systems transmit multiple radio signals. These signals differ in their frequency band and signal structure. All of the signals can be used for ranging but some don't provide any navigational data. They are used as an additional signal mostly to reduce the error that is caused by ionospheric delays.
Most GNSS systems also transmit signals that can only be used by authorized users (military, government operations, ...).
Pseudorange is determined by a delay between signal transmission and signal reception. This delay can be measured either with the use of the ranging code or the carrier signal.
Code based positioning
The ranging code is a binary pseudo-random sequence that is periodically transmitted by each satellite. In the case of the GPS L1 signal, this pseudo-random code is repeated every millisecond. The GNSS receiver runs the same exact pseudo-random code as the one transmitted by the satellite. The receiver compares it's internal code with the received satellite code. Due to the distance between the satellite and the receiver both codes aren't aligned. The receiver determines the time the signal needed to reach it by delaying it's own pseudo-random sequence until it is aligned with the received sequence.
Image 10: Received satellite range code and identical receiver range code
Binary pseudo-random sequences are composed of chips. They are similar to bits except they don't contain any data. Sequences of chips are specifically picked so it can be easily determined if they are aligned or not. The L1 GPS signal chip duration is around 1 microsecond; if the receiver sequence misalignment is equal to 1 chip the range error is around 300 meters (due to the constant speed of light at which the signal is travelling, 1 microsecond of travel time corresponds to about 300 meters of distance traveled by the signal). The misalignment of precise GNSS receivers is around 1 to 2 percent of the chip duration, which equals to a ranging error between 3 and 6 meters.
Carrier based positioning
Carrier based positioning uses a carrier signal wave to determine the range. The wavelength of carrier signals is significantly shorter than the chip duration of ranging codes.
For example the GPS L1 range code frequency is 1.023 MHz with the chip duration of around 1 millisecond which brings us to the accuracy of 3 to 6 meters with precise receivers. The carrier frequency of the GPS L1 radio signal is 1575.42 MHz (around 1500 times higher than the range code frequency) and the wavelength of the carrier signal is approximately 19 centimeters. If an exact number of wavelengths and the phase of the signal was known, a positioning accuracy in the range of millimeters could be achieved. However due to the periodicity of the signal (sinusoidal signal with phase changes) the comparison of the internal predicted signal with the received signal yields the same solution for each signal cycle (signal ambiguity). Another unknown term is the signal phase at the time of transmission from the satellite.
Image 11: Periodic carrier signal - phase delay can be misaligned for a number of wavelengths (ambiguity)
Carrier based positioning can be achieved with the Real Time Kinematics technique (RTK) or with Precise Point Positioning techniques (PPP). Both techniques combine code and carrier based positioning principles. Carrier phase or frequency tracking are also sometimes used to correct or smooth the code-based pseudorange measurements.
GNSS navigation message is transmitted by the same signal as the ranging code but at a slower rate. For example the GPS Navigation message is modulated alongside ranging codes at a rate of 50 bit/s and it is divided in to 5 sub-frames where each is 300 bits long. Therefore it takes 30 seconds to receive the whole navigation message. In general navigation, messages provide clock, satellite position, satellite telemetry and information on satellites in the constellation.
GPS navigation message
Sub-frame number
Description
1
Telemetry and handover words
Satellite clock, GNSS time relationship
2 and 3
Telemetry and handover words
Ephemeris (precise satellite orbit)
4 and 5
Telemetry and handover words
Almanac component
Telemetry and handover words This part contains the satellite status, indication on it's health and the satellite time. The Receiver uses this part of the message to synchronize it's time with the GPS time and determines if it is going to use the signal from the transmitting satellite.
Satellite clock - GPS time reference Contains information on the GPS time (number of weeks since a specified date and number of 1.5 seconds since the start of the week) and a relationship between the GPS and satellite time (for satellite clock error corrections).
Ephemeris Gives precise information on the satellite orbit shape and orientation, the satellite velocity and position at a specified time. The receiver uses this data to calculate the satellite position at the time of transmission. Because the position accuracy depends on the accuracy of the ephemerides, they are updated once every 2 hours (GNSS). Ephemeris have a certain time of validity and cannot be used if they are older.
Almanac Contains coarse orbits of all the satellites in the constellation and data for ionospheric delay corrections. Coarse orbits of other satellites in the constellation assist the receiver with the search of the satellites in view. With newer receivers this feature is not as important as it was. Ionospheric delay data is used to correct ionospheric delays by receivers that can only receive one GNSS frequency. Due to the amount of data 25 navigation messages are needed to transfer the whole almanac. With 30 seconds per message, it takes 12.5 minutes to transfer the whole almanac.
Time to first fix - TTFF
Time to first fix is the time required by the receiver to perform the first position fix after it was switched on. Normally there are three different TTFF scenarios:
Cold Start: no data is stored in the receiver. The position solution is calculated with a full sky search of satelliteswithout any almanac data. For the first position fix satellite clock correction, GNSS time reference and ephemeris from at least 4 satellites are needed. The cold start time to first fix directly depends on the rate of the navigation message transmission. In good GNSS signal environments (open view of satellites) cold start TTFF can be as low as 30 s but it could take significantly longer if the satellite reception is poor or interrupted. Cold start TTFF can be significantly reduced with the use of assisted GNSS techniques where satellite navigation data is received through a network with a higher bandwidth than the satellite signal. This is frequently used in cell phones where the navigation message and initial location are received through a mobile network or WLAN.
Warm Start: the GNSS receiver has valid ephemeris and clock correction data, it only needs to retrieve the GNSS time reference from the navigation message to obtain a fix.
Hot Start: GNSS receiver has valid ephemeris, clock correction and GNSS time reference. In addition accurate position in clock error are known. The position calculation is performed without any information from the navigation message.
Satellite clocks The nature of GNSS measurements requires accurate absolute time measurement by each satellite. An error of 10 nanoseconds in the satellite time measurement gives an error of 3 meters in the pseudorange to that satellite. Despite the use of accurate atomic clocks on satellites the measured time tends to drift and has to be monitored by more accurate atomic clocks on ground control stations. Clock correction model on satellites is periodically updated and is used in position calculations. Satellite clock errors still cause a mean error of ±2 meters in range measurements (GPS). This errors can be further reduced with more accurate measurements and clock modeling or with differential GNSS techniques.
Ephemeris errors Ground control stations measure satellite orbits in constellation and calculate their change in the near future. Satellite orbit parameters are frequently updated (2 hours GPS) and have limited period of validity (4 hours GPS). Orbits changes due to effects of gravity can be accurately predicted. The variability in solar radiation pressure causes most of the errors. Ephemeris errors cause a mean error of ±2.5 meters in range measurements (GPS). Those errors can be eliminated with the use of differential GNSS techniques.
Ionospheric delays Ionosphere is a layer of atmosphere that starts at 60 km above the Earth surface and extends to an altitude of 2000 km. It contains a partially ionized medium caused by Sun's ionizing radiation in UV and X spectrum and presence of charged particles. The propagation speed of GNSS electromagnetic signals depends on the ionosphere electron density. During the day the electron density rises due to Sun's radiation and during the night free electrons recombine with ions to produce natural particles reducing the electron density. Microwave GNSS signals are delayed in the ionosphere. This delay is proportionate to electron density and signal frequency. The mean range error because of ionospheric delays is ±5 meters but can be more during the periods of high ionospheric activity. Ionospheric delays can be mitigated with different techniques:
Dual frequency receivers: receiver compares measurements from two signals with different frequencies transmitted by the same satellite. Because ionospheric delay is proportionate to signal frequency, range error can be calculated and removed from position calculation.
Differential GNSS techniques: a fixed point base station measures the delay caused by ionospheric errors and transmits this data onto a communication network. Receivers with differential capability can use this data to remove ionospheric errors. The differential solution accuracy is proportional to the distance between the base station and the receiver because of the differences in ionospheric conditions.
Ionosphere modelling: mathematical models of ionospheric delays are used to mitigate the error. This models range from simpler empirical models to complex numeric simulations of ionosphere. Single frequency receivers with ionosphere error modelling capability normally calculate delays with simpler empirical models. Model coefficients have to be updated regularly because of the variability of ionosphere conditions. Coefficients are normally obtained from some sort of GNSS augmentation system.
Troposphere delays Troposphere is a layer of atmosphere closest to the Earth. Air humidity, atmospheric pressure and air temperature effect the propagation speed of GNSS signals. Delays due to humidity are similar to ionospheric delays but are harder to mitigate. Because the effects of humidity are more local, can change rapidly and are not proportionate to signal frequencies. They can only be mitigated with differential GNSS techniques. By contrast the effects of atmospheric pressure and air temperature can be effectively mathematically modeled. GPS troposphere delays without augmentation cause a mean error of ±0.5 meters in range measurements.
Multipath errors Multipath errors are caused by multipath interference and non-line-of-sight reception of satellite signals. Multipath interference occurs when signal is received from multiple paths due to reflections from surrounding environment. This interference distorts the shape of pseudorandom code which, causes an error in range measurements. The none-line-of- sight reception occurs when there is no direct view of the satellite and only the reflection of the signal is received. Multipath errors are mitigated with algorithms inside the receiver, with different antenna designs that block or aren't that sensitive to reflected signals. None line of sight error can be solved with the use of multiple antennas, special antennas that measure the angle at which the signal was received, cameras that film the detect objects in the environment that could produce non line of sight errors.
Instrumental delays These delays are caused by instrument circuitry, cables, antennas and internal filters used in receivers and satellites. While receiver instrumental delays are resolved in receiver clock calculation, satellite instrumental delays can be corrected with additional data or with the use of dual frequency receivers. Dual frequency receivers calculate the delay from the difference in range measurements on both signals. Single frequency receivers use a total satellite group delay that is sent with the navigation message to reduce the error. Satellite instrumental delay has impact on both code based and carrier based measurements and is proportional to satellite signal frequency.
SBAS are civil aviation safety-critical systems that support wide area augmentation. This systems consist of ground stations and geostationarysatellites. The ground station infrastructure compute the integrity of GNSS constellations, correction data and SBAS satellite ranges. This data forms the SBAS signal in space, which is transmitted by SBAS geostationary satellites. Receivers that support SBAS use this signal to:
compute the range to the SBAS satellites - increasing the number of used satellites,
reduce the amount of ionospheric error through the ionospheric model coefficients, which are provided in the SBAS message,
reduce the amount of GNSS constellation clock errors with SBAS clock corrections,
Primary purpose of the SBAS system is to increase the integrity of GNSS systems. However with the additional data the position accuracy is increased to 1 m (1 sigma). WAAS and EGNOS are certified to be used for horizontal and vertical guidance during different operations including landing approaches.
GBAS - Ground-based augmentation system
GBAS purpose is to provide integrity and safety to GNSS service for aviation during approach, landing, departure phases of flight as well as surface operations. GBAS purpose is similar to SBAS the only difference is that GBAS provides only local corrections. It normally consists of two or more fixed GNSS receivers which compute correction data and integrity of GNSS service. The differential data, integrity parameters and final approach segment data is transmitted through very high frequency broadcast. This data can be used by any aircraft in the range of coverage. GBAS increases the accuracy of GNSS position to 1 m (1 sigma).
DGNSS - Differential GNSS
Differential GNSS techniques use a network of fixed reference stations - base stations that remove satellite clock bias error, ionospheric delays and tropospheric delays. This data is then transmitted on to a network and used by receivers - rovers to improve their position accuracy. However differential techniques can not remove the errors that are caused by multipath or receiver noise. DGNSS networks don't offer integrity assurance as is the case with SBAS or GBAS. It is important to know that differential techniques depend on the accuracy of the fixed base station coordinates.
The standard differential technique DGNSS determines the errors from code based pseudorange measurements at fixed reference stations. Differential technique takes advantage of small differences in errors if the rover is close to the base station. The position accuracy of DGNSS is normally 1 m (1 sigma) but degrades at a rate about 0.5 m for every 100 km of distance away from the base station. Differential data is normally transmitted on radio frequencies or through the mobile network. Due to the slow changes in errors the correction data doesn't need to be updated in real time. DGNSS networks can be either wider area or set up locally with DGNSS receiver that supports base station mode and a data link to transmit differential corrections.
Real time kinematic is an accurate GNSS differential technique that uses carrier phase tracking to achieve high positioning performance (1 cm accuracy) close to the base station. RTK requires a base station and a rover with code range measurement, carrier phase tracking capabilities and a real time data link. The data link is used to transmit base station coordinates, code range and carrier phase measurements to the rover in real time (radio transmission or mobile phone network). Rover resolves carrier phase ambiguity with minimization of differences in base station to rover ranges measured with different satellites. The nature of this calculations also fully removes satellite clock delays. This is only possible if measurements on the base station and on the rover are done at approximately the same time. The initial ambiguity resolution takes around 10 seconds in modern dual frequency receivers with a clear open sky but could take more depending on the conditions (satellite visibility, multipath, receiver type...).
Due to the nature and accuracy of RTK solution there are certain requirements that have to be met to acquire and maintain the RTK fix solution:
only satellites that are visible to both the base station and the rover can be used in RTK calculation, RTK receivers normally require at least 5 common satellites,
signal obstructions that cause multipath or cause loss of satellite visibility can cause a loss of RTK fix and also partial or even full recalculation of cycle ambiguity,
RTK solution is valid only in the range of 15-20 km around the base station, but can be increased to the maximum of 80 km with the use of a network of RTK base stations NRTK.
RTK technique can also be used for accurate relative positions with the use of a movable base station. The absolute accuracy of this system is as good as is the solution of the moving base station. However centimeter accuracy between the base station and the rover is achievable. Movable base techniques are used in ADAS (Advanced Drivers Assistance) tests where relative position between two vehicles has to be measured.
Wide Area Real Time Kinematics is a relatively new technology that will enable RTK position accuracy for distances of up to 500 km around the WARTK base stations. This could be accomplished with a combination of RTK correction data and accurate ionospheric data. Currently there are no WARTK systems in operation yet.
PPP - Precise Point Positioning
Precise Point Positioning method enables centimeter level accuracy without the use of a nearby base station. This is achieved with precise satellite clock and ephemeris information in real time (satellite downlink, mobile network). PPP receivers have to be capable of dual frequency ranging and carrier phase tracking. Ionospheric error is compensated with dual frequency measurements. With additional processing the PPP algorithm also compensates tropospheric errors, and estimates the carrier phase ambiguity and can achieve centimeter level position accuracy. Currently the initialization period to centimeter accuracy takes quite longer (in the order of tens of minutes) than it does with RTK. However PPP techniques for real time applications are still in development. With shorter initialization times PPP could be a cheaper alternative to RTK which requires a base station in relative vicinity. PPP techniques are for now mostly used for GNSS data post processing.
Dewesoft offers several different GNSS devices for different uses and accuracy requirements. The flexibility of Dewesoft X software also enables the use of 3rd party GNSS devices.
GNSS receiver can also be used as a precise timing source for instrument synchronization. Most of the receivers have an option of PPS output, some can also generate IRIG timecodes.
Pulse Per Second (PPS)
Image 22: Pulse per second signal (low and high voltages differ with implementation)
Pulse per second is an electrical signal that consists of pulses that are less than one second long but are accurately repeated once every second. The devices adjust their clocks according to the PPS second. PPS signals have different accuracy depending on their implementation. PPS timing accuracy on commercial GNSS receivers is around ±25 ns.
All of Dewesoft navigational instruments have PPS output option. With PPS signal we can directly synchronize Dewesoft USB devices: DEWE-43 or SIRIUS USB. Dewesoft EtherCAT devices can be synchronized with ECAT Sync Junction which supports PPS input and can synchronize all of Dewesoft EtherCAT devices connected on the EtherCAT network.
IRIG time code
Inter-range instrumentation group time codes are standardized formats for transfer of timing information. IRIG signals are structured as data frames with absolute time information which are sent periodically at a specified rate. There are six different IRIG time code formats designated with letters A, B, D, E, G and H. Each differ in the rate of data frame transmission. There are also three different ways for hardware implementation (different modulations) of IRIG time code signals.
From Dewesoft navigational instruments DS-CLOCK can generate IRIG-B DC modulated time code from it's internal GNSS receiver. DS-CLOCK has also the possibility to transform IRIG A, B and G DC or AC modulated time codes to IRIG-B DC modulated signal. IRIG-B DC time code input is directly supported by DEWE-43, SIRIUS and DS-NET devices for synchronization. It is also supported by ECAT Sync Junction for synchronization of Dewesoft EtherCAT devices.
To use GNSS devices with Dewesoft X they have to be added to Dewesoft devices setup. The procedure differs depending on the device.
DS-VGPS-HSC and DS-CLOCK
Both devices feature Dewesoft USB interface which enables Dewesoft X to automatically recognize the connected device. If detection wasn't successful it can be manually performed in Dewesoft X Settings.
Image 23: Entering Dewesoft settings
If the unit isn't listed in Devices menu the device recognition can be performed with a click on the Refresh button.
Image 24: Refresh button triggers a scan of the devices connected to the system
Device settings can be accessed by clicking on the device in the device list.
Image 25: DS-CLOCKv2 device settings
Embedded GNSS receivers and DS-VGPS-HS
Receivers inside SBOX or MINITAUR and DS-VGPS-HS are connected to the computer through the RS232 interface. They can be added inside Dewesoft X device settings by clicking the Add button.
Image 26: Add button in device settings
Add device menu opens. Select Dewesoft RS232 (Topcon/Javad/NVS) option.
Dewesoft X adds the device to the current system configuration and automatically scans for GNSS receivers connected to the computer. After a successful scan, receiver settings appear in device settings. Settings differ depending on a receiver type and its configuration options.
Both GNSS-supported inertial navigation units are supported in Dewesoft X through the Navion and DS_IMU plugins. Their setup and use isn't covered by this course due to the additional information that is needed to set up units. All of the information can be found in the NAVION i2 user manual and the DS_IMU_GYRO_manual.
NMEA compatible GNSS receivers
Dewesoft X supports any GNSS receiver that sends NMEA messages through a USB COM port. To add NMEA compatible GNSS receiver to the current device configuration the NMEA compatible GPS has to be added in Add device menu.
Image 29: Add device menu, NMEA compatible GPS
Similar to Dewesoft RS232 GNSS receiver the NMEA receiver is added to the current device configuration. If the device cannot be found there is a possibility that the selected COM port isn't the correct one. Auto search can be performed on different COM ports to find the connected GNSS receiver. COM port number with the receiver connected can be found in Windows Device Manager.
Image 30: Connected NMEA compatible GNSS receiver
Legacy devices
In older DewesoftX releases the legacy devices could be found in Hardware settings. To add a Legacy device select the Legacy devices menu in Add device window.
Image 31: Adding a legacy device in Dewesoft X
Legacy devices were removed from DewesoftX with the 2021.4 release.
First it is needed to make a quick Channel setup where the GPS channels you need can be defined and enabled for a measurement, secondly to create a proper display with data you want to see and then the measurement is ready to start.
Channel setup
Once a GNSS device is added to the list of devices a new GNSS screen appears in Dewesoft X channel setup.
Image 32: GNSS screen in Dewesoft Channel setup
GPS screen in Channel setup consists of:
GNSS channel list: all of the channels available on the connected GNSS receiver,
Status indicators:
synchronization indicator screen: turns green if PPS synchronization signal is received by Dewesoft X,
GNSS fix status indicator: shows GNSS solution type. On the image 32 the GNSS receiver is in standalone mode and colored in grey. Indicator turns green when status is RTK fixed.
Satellites in view displays the satellites that are detected by the GNSS receiver. Satellites that are used in position calculation are designated as Used and colored according to their constellation (GPS - green, GLONASS - red). Satellites that are visible but are not used will be in position calculation colored in white.
Measure mode
Both for measure and analysis mode you can choose different displays upon your needs - recorder, digital displays, etc.Map display displays GNSS data and visualizes the path that was done by the receiver as it is shown on Image 33. Map display in also fully modifiable in a Design mode, where it can be previewed in 2D, 3D or Terrain view, which you can select under Map display settings - click on the display and settings will be shown in the left window (see the Image 33).
Image 33: GPS screen in Dewesoft measure mode
If you have included synchronization, you will be able also to see the current time displayed in the measure mode on the top of the screen beside computer resources status - see the Image 33. Synchronization is then successful when the circle will change its color in green and time will be written in black. If synchronization is lost or if there is a drift in synchronization signal, the displayed light and the numbers will turn to red. Large changes in synchronization signal time during the data acquisition can trigger a creation of a new data file that will be synchronized according to the new synchronization signal. This could happen after long periods without GNSS fix.
 Image 1: Galileo GNSS satellite
Image 1: Galileo GNSS satellite Image 2: Possible receiver positions are on the circle around the satellite
Image 2: Possible receiver positions are on the circle around the satellite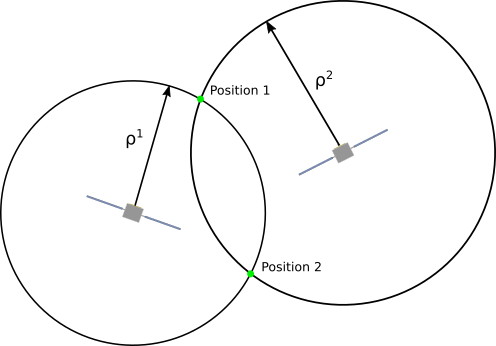 Image 3: Receiver can lie on one of the intersections
Image 3: Receiver can lie on one of the intersections Image 4: Positioning with three satellites, possible positions with receiver clock error (red),
Image 4: Positioning with three satellites, possible positions with receiver clock error (red), Image 5: Possible receiver positions lie on the sphere around a satellite
Image 5: Possible receiver positions lie on the sphere around a satellite Image 6: Intersection between two spheres forms a circle
Image 6: Intersection between two spheres forms a circle Image 7: Two possible positions
Image 7: Two possible positions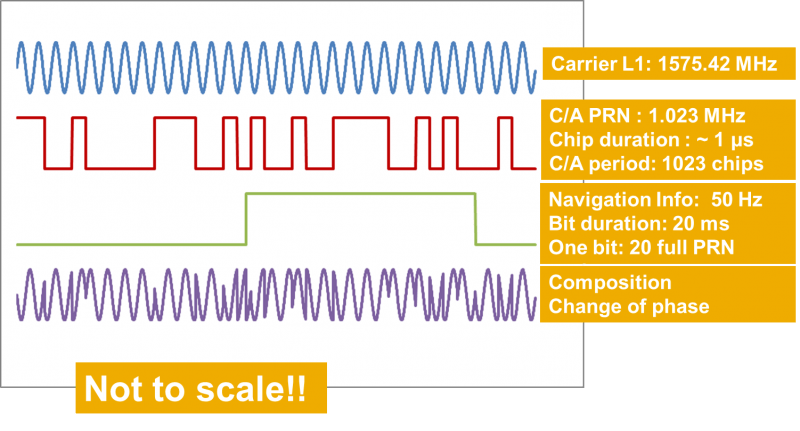 Image 8:
Image 8:  Image 9:
Image 9: 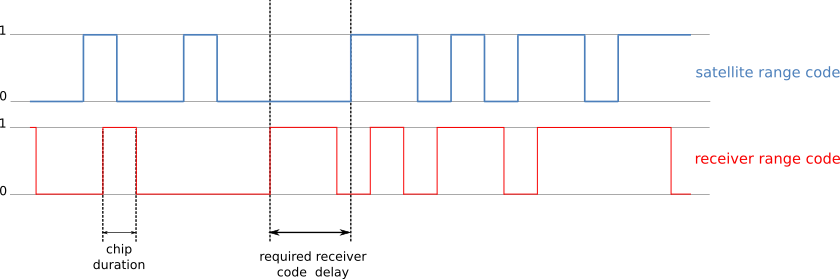

 Image 12:
Image 12:  Image 13:
Image 13: 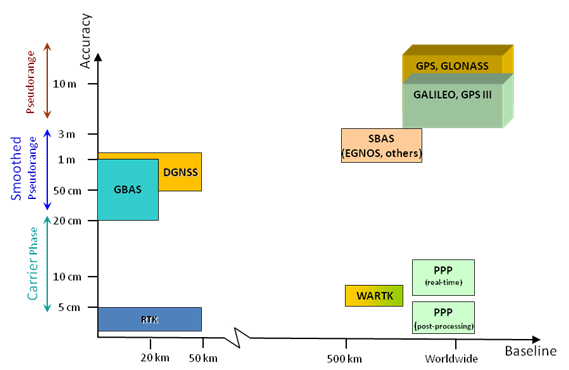 Image 14:
Image 14:  Image 15:
Image 15:  Image 16:
Image 16: 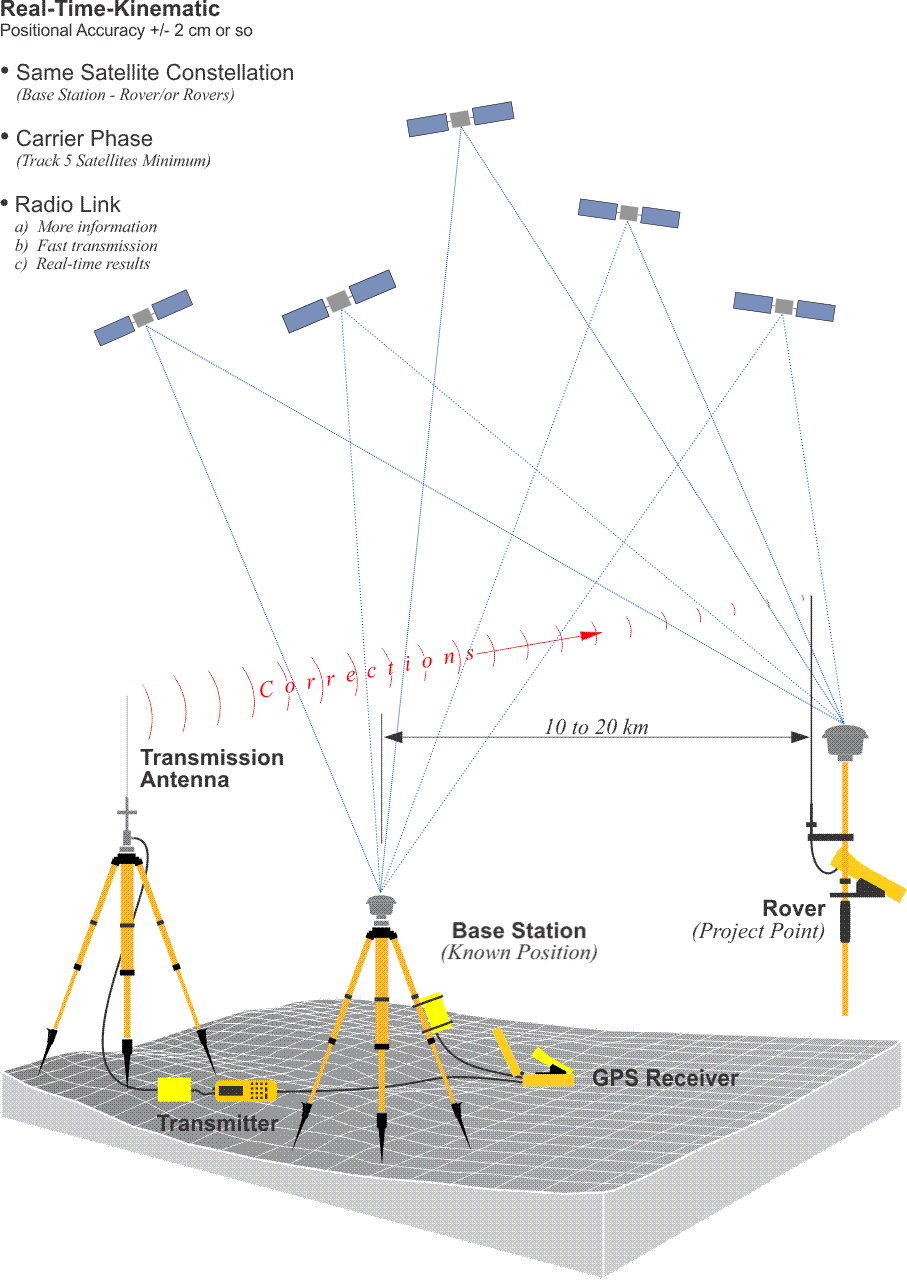 Image 17:
Image 17: 

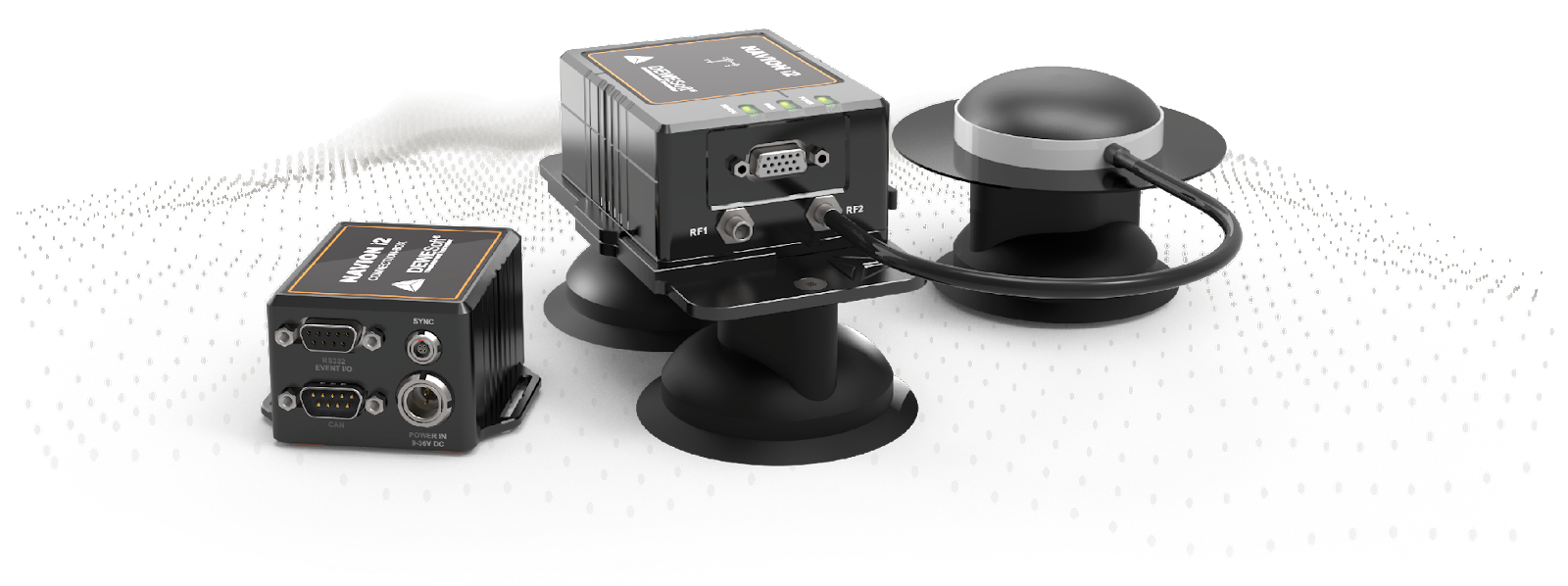

 Image 22: Pulse per second signal
Image 22: Pulse per second signal Image 23: Entering Dewesoft settings
Image 23: Entering Dewesoft settings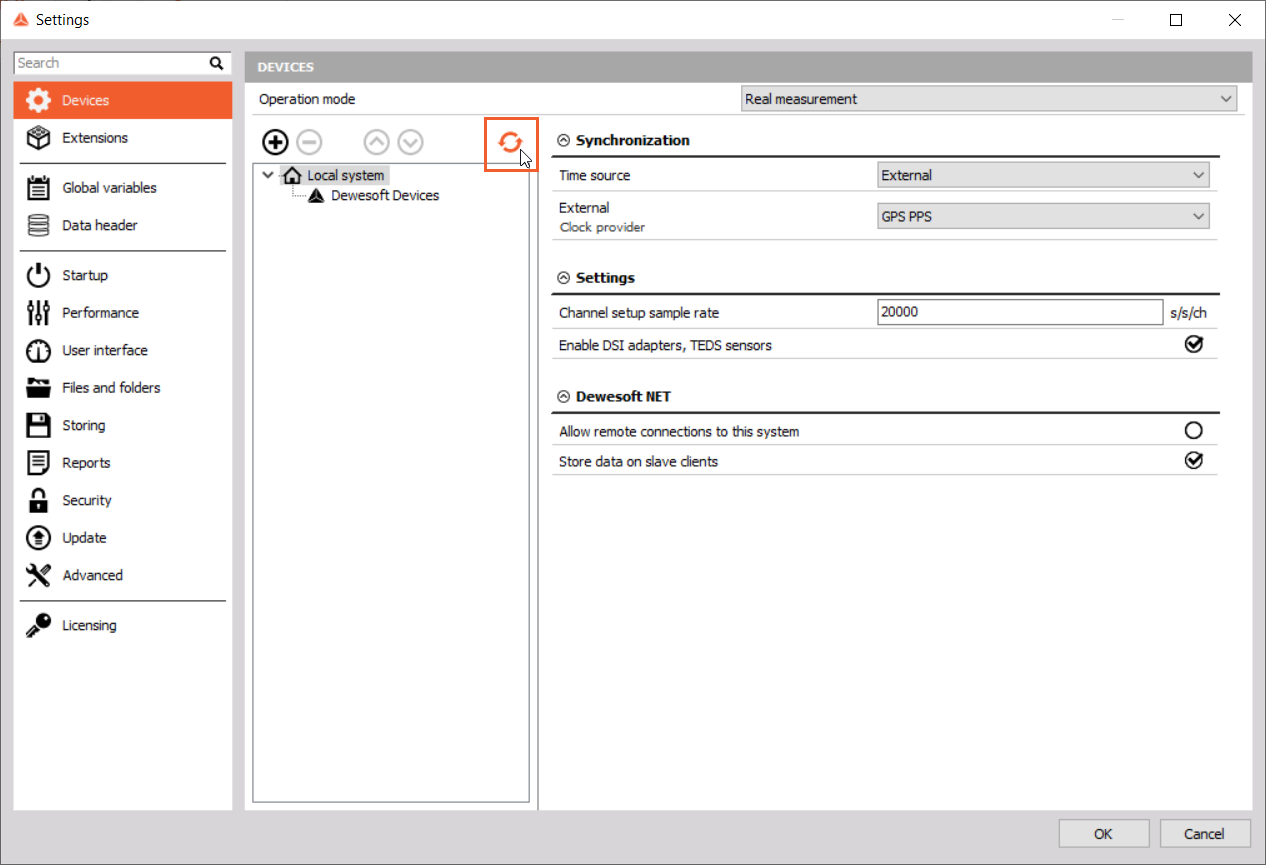 Image 24: Refresh button triggers a scan of the devices connected to the system
Image 24: Refresh button triggers a scan of the devices connected to the system Image 25: DS-CLOCKv2 device settings
Image 25: DS-CLOCKv2 device settings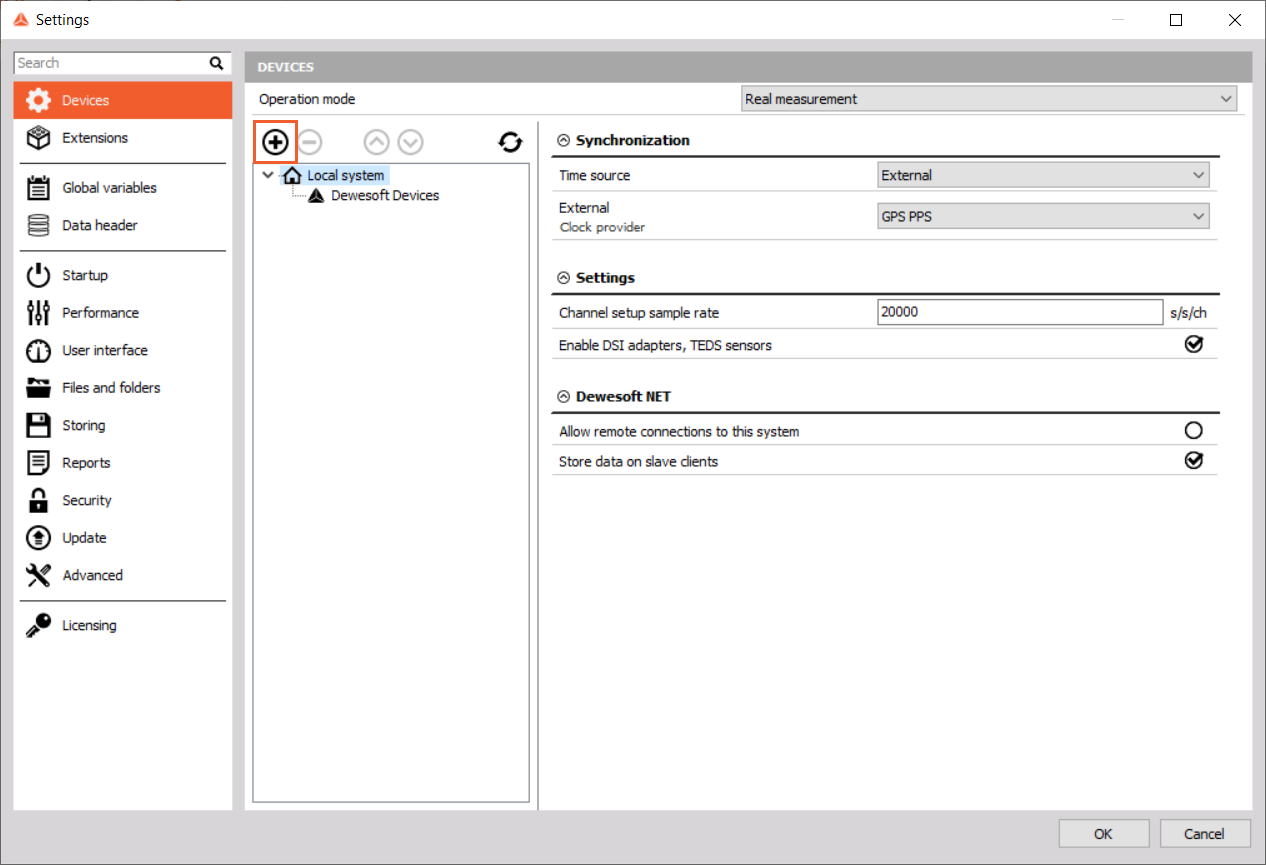 Image 26: Add button in device settings
Image 26: Add button in device settings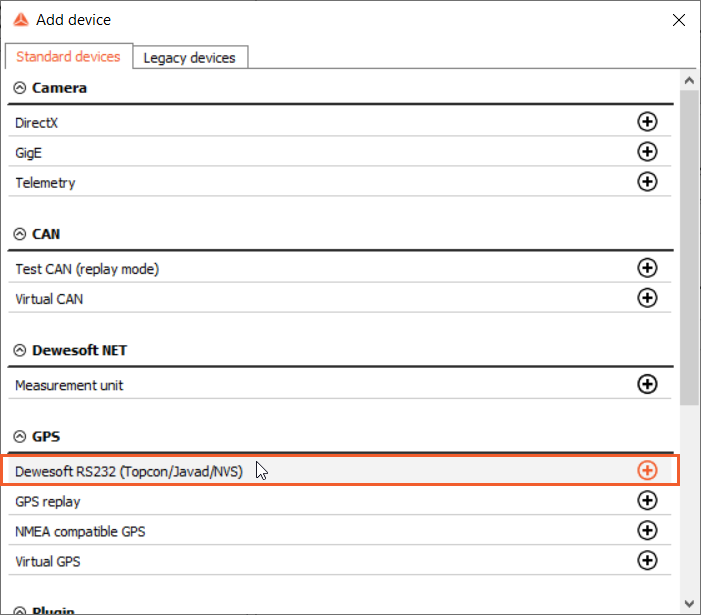 Image 27: Add device menu, Dewesoft RS232(Topcon/Javad/NVS)
Image 27: Add device menu, Dewesoft RS232(Topcon/Javad/NVS)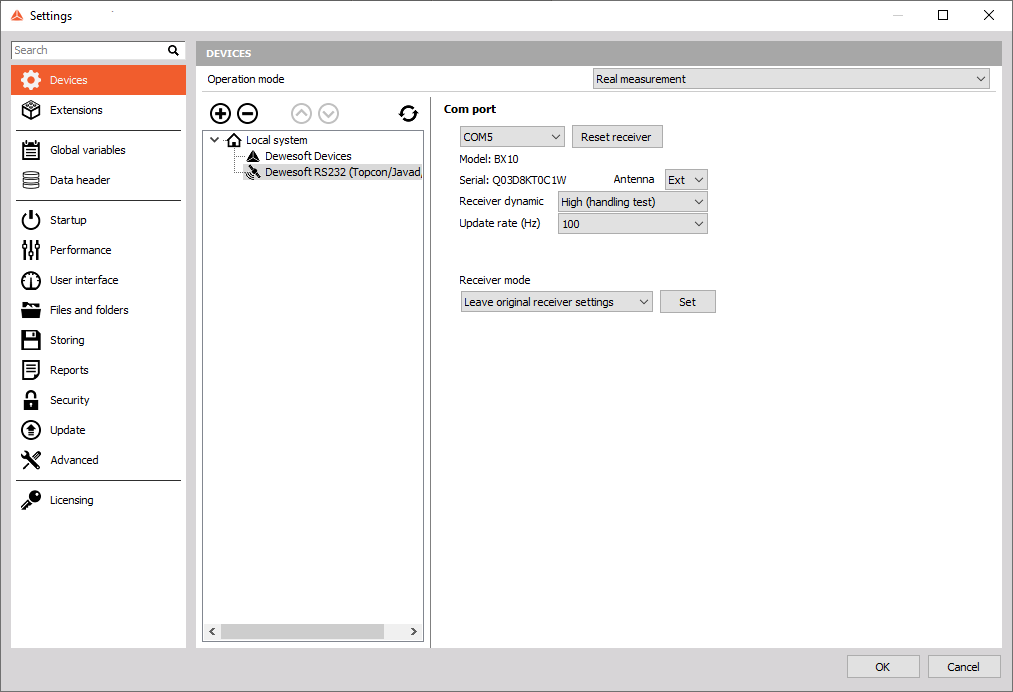 Image 28: Dewesoft RS232 GNSS device settings (Topcon BX10 GNSS Receiver)
Image 28: Dewesoft RS232 GNSS device settings (Topcon BX10 GNSS Receiver) Image 29: Add device menu, NMEA compatible GPS
Image 29: Add device menu, NMEA compatible GPS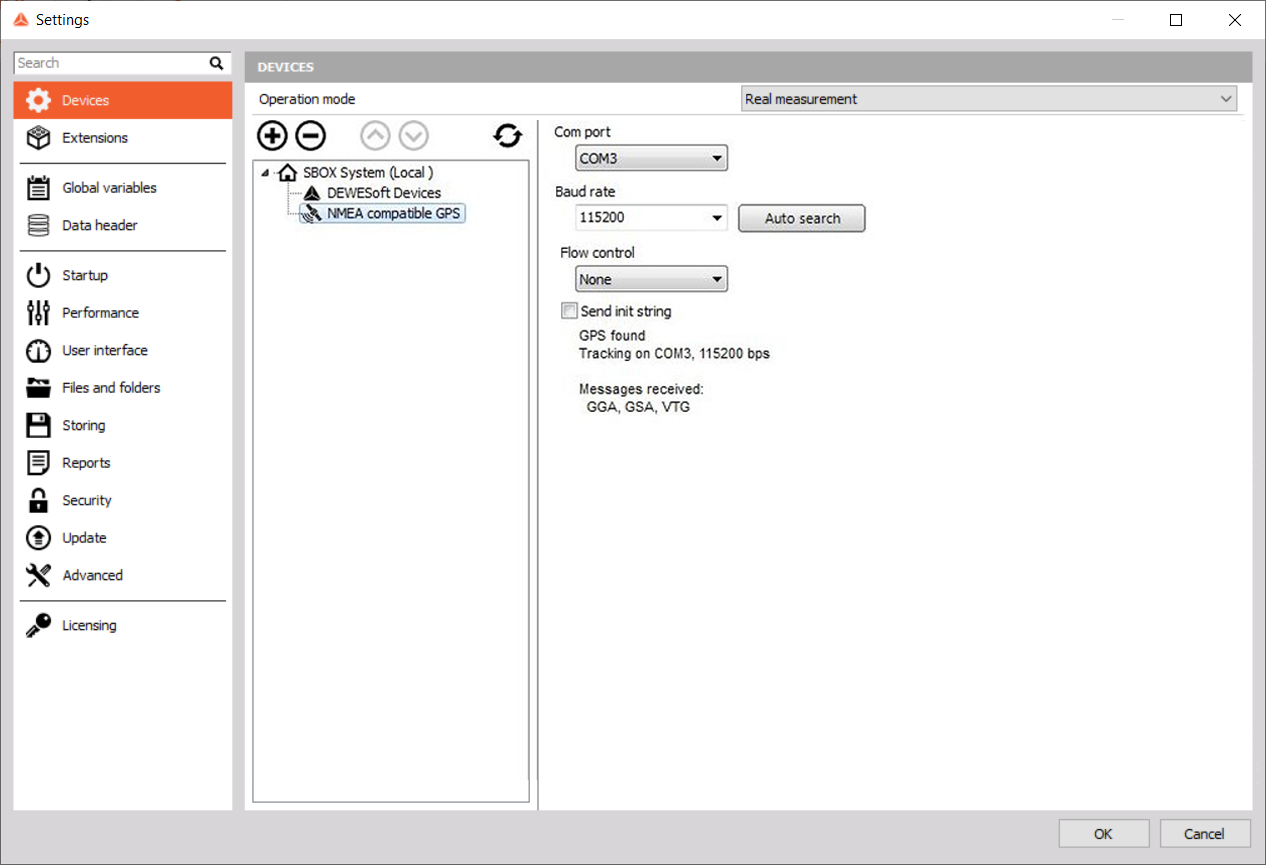 Image 30: Connected NMEA compatible GNSS receiver
Image 30: Connected NMEA compatible GNSS receiver Image 31: Adding a legacy device in Dewesoft X
Image 31: Adding a legacy device in Dewesoft X Image 32: GNSS screen in Dewesoft Channel setup
Image 32: GNSS screen in Dewesoft Channel setup Image 33: GPS screen in Dewesoft measure mode
Image 33: GPS screen in Dewesoft measure mode