What is the Dewesoft X IRIG 106 Chapter 10 plugin?
The Dewesoft Chapter 10 plugin is a specialized plugin to read a closed recorded data file or a real-time Ethernet stream of Chapter 10 formatted data.
What does it do?
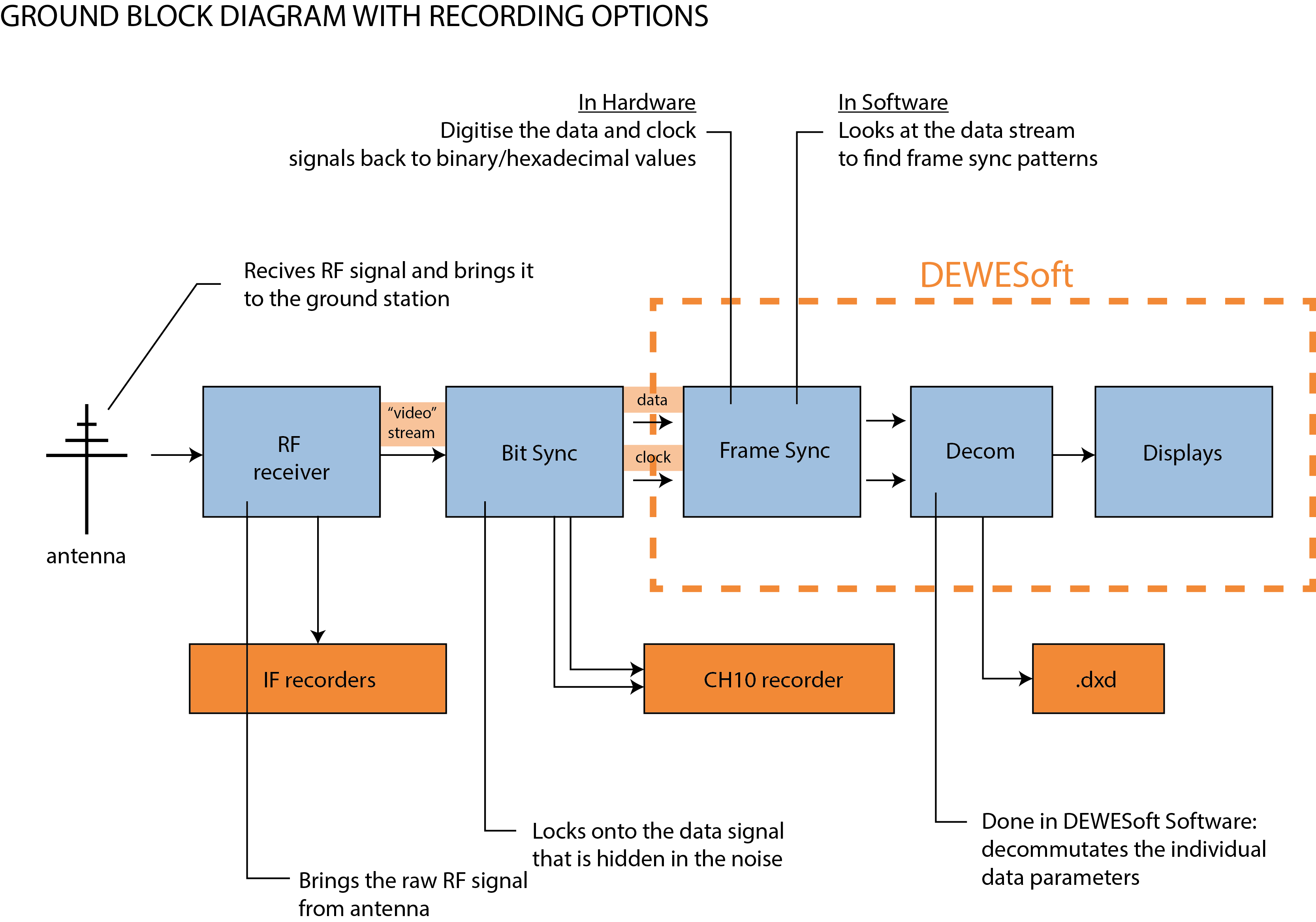
The Dewesoft Chapter 10 plugin will receive the incoming Chapter 10 data stream from a closed file playback from the hard drive or from real-time Ethernet stream. The Chapter 10 plugin will then find the embedded time in the Chapter 10 file to set the Dewesoft master clock too. Then the Chapter 10 Plugin will look at each data channel included in the data stream to then prepare it for processing. For the Analog, Video, and Discrete data the Chapter 10 plugin will put it into the proper data channels for processing and display. It will then hand off the more complex data types like PCM and Arinc429/Mil-1553 data to their appropriate plugins in Dewesoft for further processing to get to the individual measurement channels.
How to start?
If we want to start we need the following files:
All the above files can be downloaded from Dewesoft Download Center.
NOTE: To download beta software, free registration and login is required.
Copy all plugin files under Dewesoft folder Addons. Now you can run Dewesoft X, go to Settings -> Devices, and add Chapter 10 extension.
 Image 60: Under Devices, add Chapter 10 extension
Image 60: Under Devices, add Chapter 10 extension
In the Chapter 10 Hardware setting there are two modes that the Plugin can run in:
- Recorder Mode: This is where the plugin will acquire data from different sources in the software in real-time. Then Dewesoft X will either record this data to the hard drive of the computer in a.CH10 file format or can real-time transmit it out the Ethernet stream in a Chapter 10 defined packet structure for other devices to receive.
- Reproducer Mode: This is where the plugin will read in a Chapter 10 format data stream to process the data within Dewesoft X. The Input Type of Chapter 10 file is to read a. CH10 file directly from the hard drive of the computer. The other input type of Ethernet: is to bring in the Chapter 10 Ethernet packet from another device in real-time for processing.
Image 61: Select the device type
Then go to Channel setup and go to Chapter 10 tab. This is the screen that appears:
Image 62: Go to Channel setup and click on Chapter 10 tab
As you can see on the image 62, the file was not found. What we have to do next is to:
A) Select our ch10 file or multiple files (that have the same setup),
This is done by hitting the + button to add files and the - button to remove unwanted files. If using the multi-file playback then the Up button can be used to reorder the files.
B) Choose the start and stop position in the file we want.
This is done so use can playback just a small section of the recording. The "..." button will allow you to set exact times for this. Then uses can replay file at a faster or slower rate. Continuous Loop Mode is for repeating the Chapter 10 file on a loop for playback checkouts. Fast Playback will ignore the speed of the recording and once the user hits the store button Dewesoft X will process the Chapter 10 file as quickly as the computer can to a DXD file.
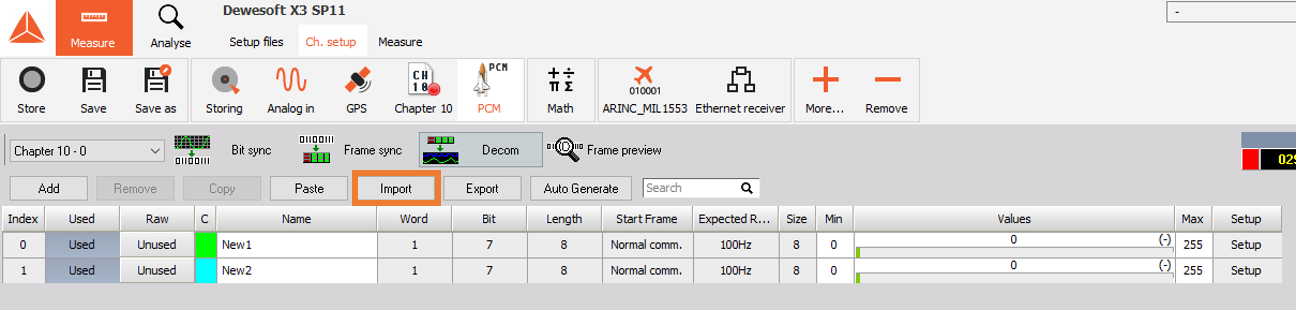
C) Add or remove channels, Import Channels and Auto-Scan
The Add and remove allow you to manually define channels in your Chapter 10 file. The Import button will let you load a TMATs file for setup. Then the Auto Scan button will scan the Chapter 10 file for the TMATS built into it to configure the Chapter 10 plugin.
D) Enable wanted channels, change its names or see details in setup. *Note the Time channel must always be selected when playing back any data type.
Image 63: Steps you have to perform in case the file was not found
NOTE: Packets started to appear in format 0/n, where 0 is the number of error messages out of all messages.
In this way, we can preview and enable any type of channels like AI, Time, UART, discrete, video data, and more. The next chapters will show how to do this.
Analog and Discrete Channels
To enable analog or discrete data packets, we set wanted channels to used:
Image 64: To enable analog or discrete data packets, set the wanted channels to 'Used'
To present it we go to Measure -> Design mode. We would want to present signals on two different controls: Recorder for analog signals and Tabular values display for discrete signals. We add it to wanted place and assign channels to it:
Image 65: Add recorder, tabular values display and apply channels to them
Discrete value channel is displayed in Raw scaling (a); on bottom left (b) Binary format was selected from the menu on left (c) and on second display (d) Hex format was selected.
Video Stream
To enable Video stream, add Telemetry video under Add Device -> Camera:
Image 66: Add Telemetry Camera
Image 67: Added telemetry camera
After that, go back to the Channel setup and you will see the Video tab is already generated with PCM telemetry cameras inside.
Image 68: Video tab will be generated as you add telemetry camera as a device
We can preview video stream under Setup. Present a video stream in Measure mode under add Widget we choose Video visual control and assign the Camera 0 channel to it.
PCM Stream
First, enable PCM channels:
Image 69: Enable PCM channels in Chapter 10 tab
Now we can show PCM channel values in Measure tab -> Design -> Add tabular display data -> select PCM Data channel on right. Enable also Raw scaling and Hex format on in the left section:
Image70: Show PCM channel values in a tabular display widget
Decoding PCM Stream
Dewesoft PCM plugin supports the decoding of the PCM stream.
Go to Settings -> add Device -> and add PCM plugin. Select Chapter 10 as a PCM card.
Image 71: Add PCM plugin and select Chapter 10 as a PCM card
Click OK, go to Ch. Setup, click PCM icon, select PCM data as Input Channel (it is available if tetelemePCM channel is enabled in Ch.10 setup) and click Load Settings from Channel button to load setting from Chapter 10 file (TMATS settings).
Image 72: Load Settings from PCM Data channel
Now we can see the Frame sync window:
Image 73: Frame sync
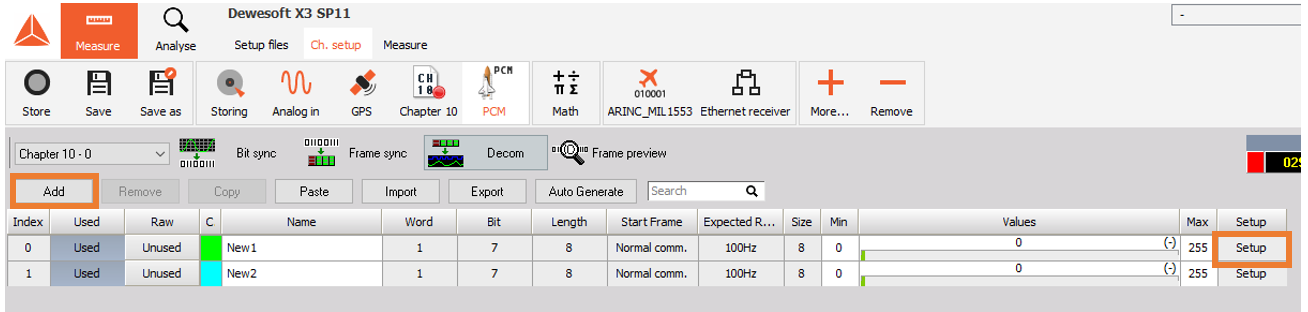
To add channel go to Frame preview and click on the PCM frame -> Add New Channel:
Image 74: Add new channel in Frame preview
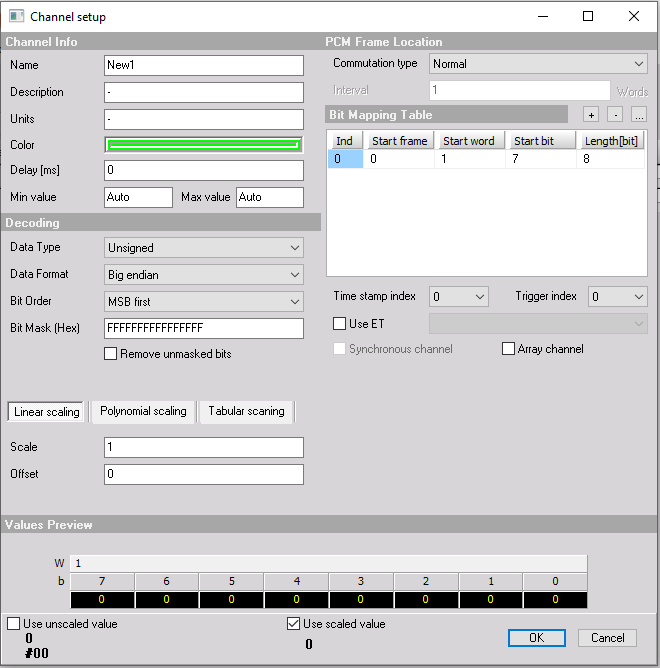
New window opens where parameters of the new channel can be set:
Image 75: Parameters of the new channel
Measure
We can view all enabled channels in the Measure tab on appropriate visual control that we can select and present in Design mode. To visualize wanted channels on the displays, we just click on the names on the right panel.
Image 76: To visualize wanted channels on the display, click on the names of channels on the right panel
Additionally, we can add live mathematics, or in Analysis mode on all channels under Ch. Setup -> Math.
In the end, stored channels can be exported in various formats that Dewesoft X supports.
 Image 1: Space telemetry systems
Image 1: Space telemetry systems 
.png)









.png)
.png)
.png)