The basic information about analog sensor editor in Dewesoft, where we can define new sensors that we use.
Dewesoft X offers a Analog sensor database that holds the list and the properties of all sensors which will be used. In addition to the linear scaling, which can also be done in the input channel setup, the sensor database also offers to scale by table or by a polynomial and even transfer curves can be defined.
To enter the sensor editor go to Options -> Editors -> Analog sensors
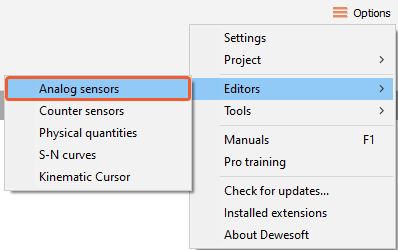 Image1: Path to analog sensor editor
Image1: Path to analog sensor editorThe sensor database can be created and adapted according to your requirements (used measurement hardware). The sensor (database) editor offers several functions for creation, editing, and managing sensors:
- Add sensor (creates a new sensor in the sensor database)
- Remove sensor (removes the sensor from the sensor database)
- Shown Columns (show or hide different columns in sensor database)
- Import (import existing *.xml, *.dxb sensor databases or custom XML files *.e2x)
- Save (store the sensor database to file)
 Image 2: Options in Analog sensor editor
Image 2: Options in Analog sensor editorEach sensor is defined with the information in the database:
- Physical quantity, serial number, calibration date, calibration period
- General sensor information
- Scaling type (linear, polynomial, table)
- Transfer curve (used for sensor correction)
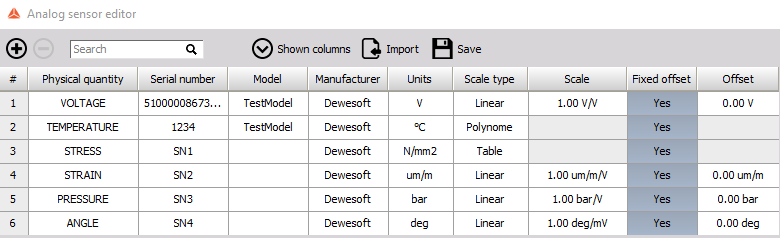 Image 3: Defined sensors in the Analog sensor editor
Image 3: Defined sensors in the Analog sensor editor








































