Training course summary
In this course you will learn the basics of how to set-up and use Orbit analysis, and how to interpret the analysis results.
The course will also include data examples and the main theory behind the calculations, and in the end you should have gathered enough information to be able to get started using the application yourself.
As for all DEWESoft courses, this course is completed with a quiz. The quiz will have questions for which the answers can be found in the course material.
Why should you use Orbit Analysis?
Having a steady, continuous operation with as few malfunctions and vibrations as possible is essential for maximizing productivity and ensuring the reliable operation of a machine - whether a huge rotating mass in a power plant or a high-revving compressor. Knowing the rotor movement, then different phenomena of lubrication and bearing states can be determined and consequently, machine operations can be optimized.
To achieve this, measurement and analysis of rotational vibration data is crucial. Dewesoft Orbit analysis is an ideal analysis tool for rotor dynamic movement examination, assessment of any motion restrictions causing vibration, and consequent prevention of potential, unwanted damages to rotating machinery that would result in premature wear of components and could cause critical failure.
Orbit analysis can monitor and analyze the current state of journal bearings and how such bearings have behaved over time while in operation.
Orbit analysis is designed specifically for such bearing types to inspect and diagnose shaft / journal movement, the oil lubrication, and the clearance.

Dedicated display widgets for orbit analysis helps create a clear overview of the state of one or multiple bearings. Such analysis is crucial to understand the impact of the lubrication oil, the shaft load, the rotation speed, the clearance, and the wear and tear of bearing.

When should you use Orbit Analysis?
Orbit analysis is applicable for analysis of journal bearings. Journal bearings are also sometimes referred to as bushings, plain bearings, or sleeve bearings. These bearing types all have a fluid lubrication layer in between the shaft and bearing which makes the shaft have a sliding action with a loose movement within the clearance.
Orbit analysis is not applicable for roller bearings and gears, or other bearing types having roller action or direct connection between the shaft and bearing, since you do not have a fluid medium / lubrication in between, and hereby no loose shaft movement. Instead, for such direct contact bearings and gears Order analysis is the proper application.
What is needed to configure and get going with Orbit Analysis?
The basic measurement setup for orbit analysis consists of:
- pair of proximity probes (also called eddy-current probes) per bearing,
- a keyphasor (3rd proximity probe or a tacho sensor),
- a data acquisition system,
- orbit analysis software,
- and a computer.
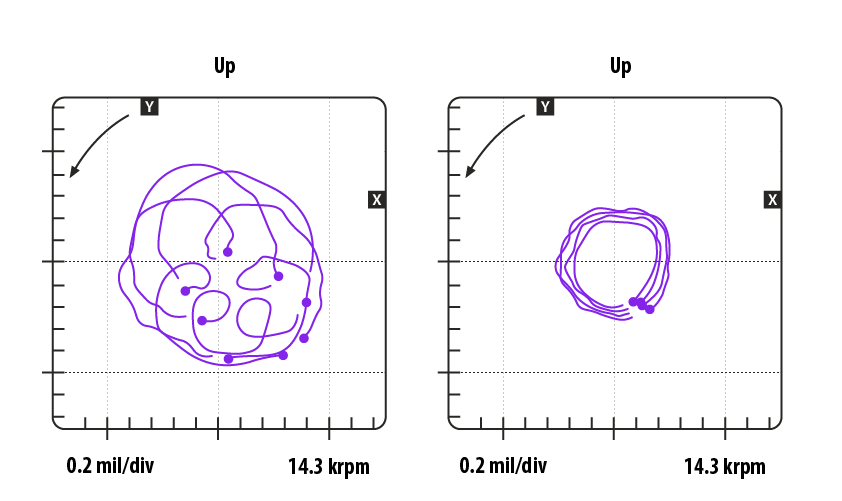
By detecting the shaft proximity in two directions (x and y) rotor movement is calculated and displayed throughout the measurement.